목차
1. 배경
2. 보드 구성 및 소스코드
3. 실습결과
1. 배경
칩 설계를 공부하다 보니, 모터 제어가 필요한 경우가 있었습니다.
모터 제어 등에서 진동수 혹은 주기를 다룰 때는 PWM이 필요합니다.



이번에는 PWM과 Buzzer를 이용해 노래를 연주해보려고 합니다.



2. 보드 구성 및 소스코드
이번에도 역시 다른 분석 없이 PWM의 이론을 테스트할 것이기 때문에,
Board Select 방식으로 진행하겠습니다.
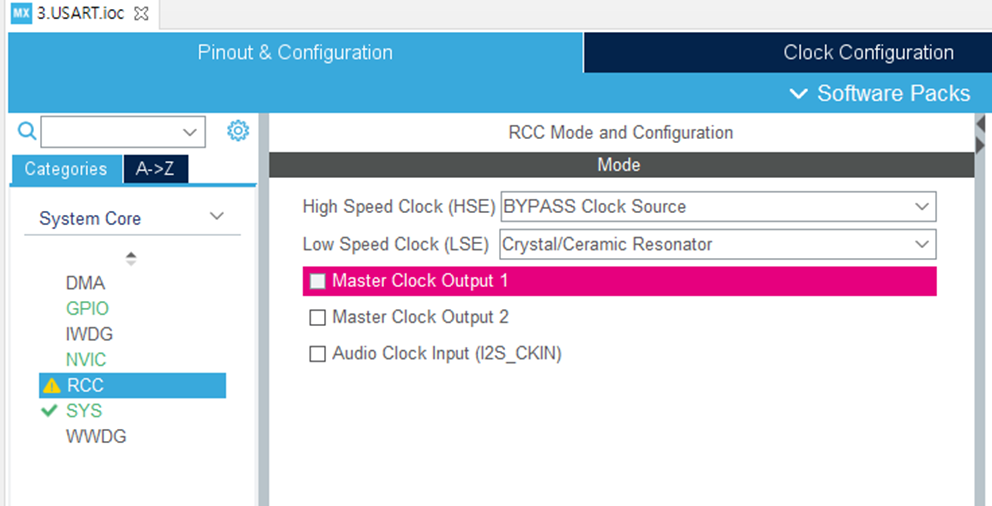
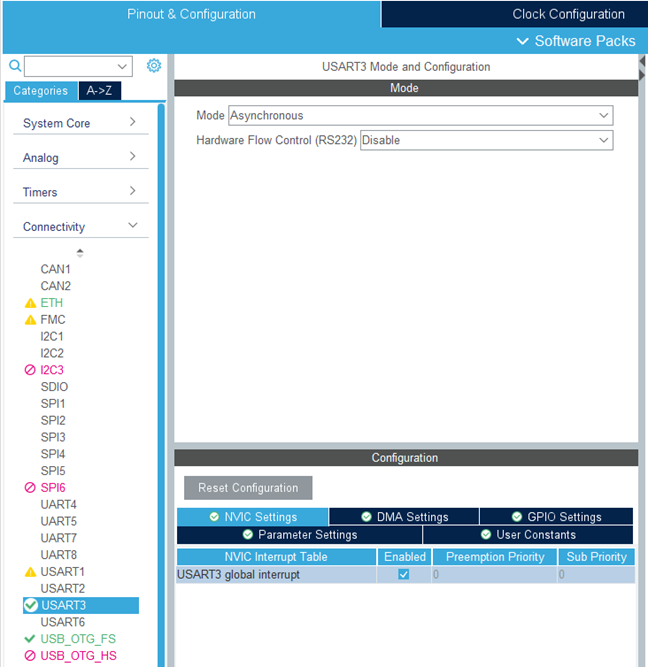
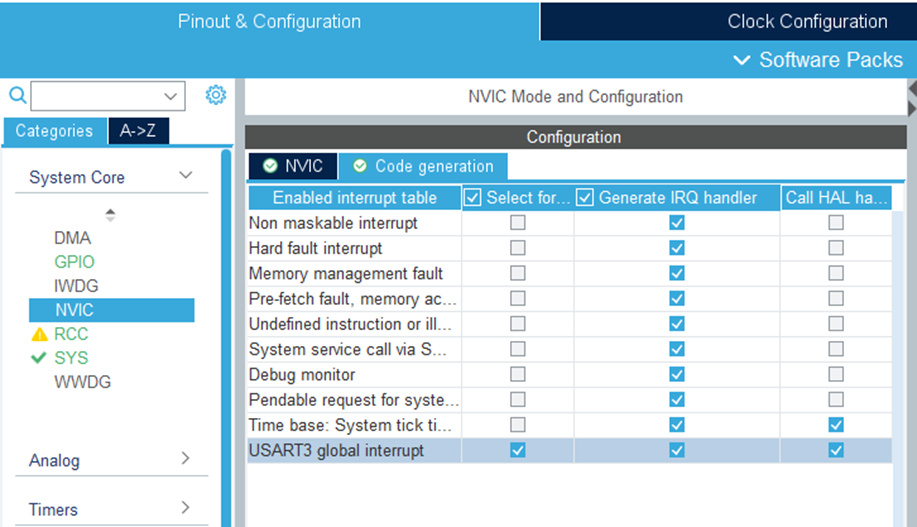
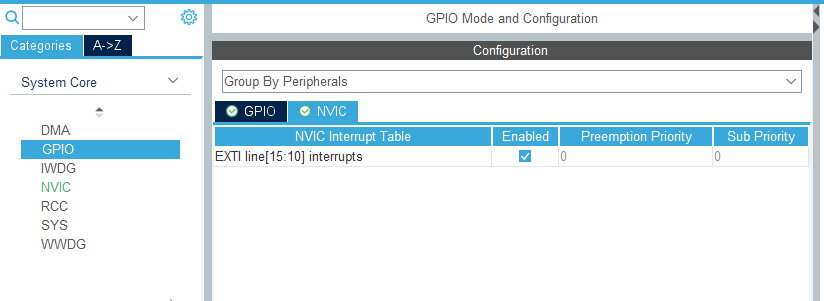
- 보드 세팅

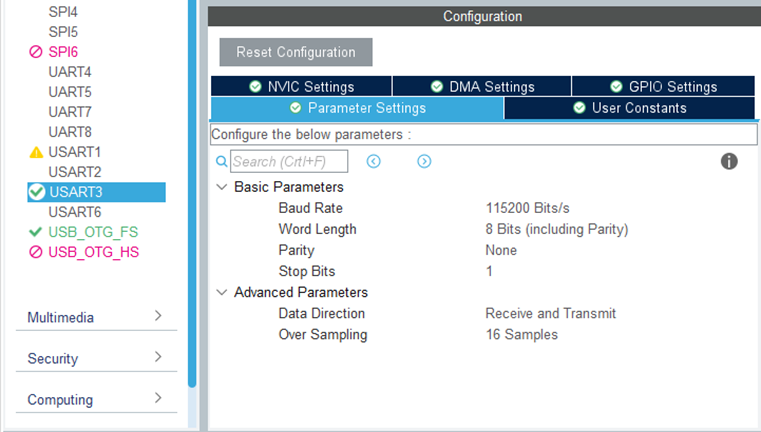
- TIMER 세팅

Prescaler는 설정하기 나름입니다.
결과적으로 원하는 주파수만 계산할 수 있으면 됩니다.
- PV
/* USER CODE BEGIN PV */
#define c 261.63
#define c_sharp 277.18
#define d 293.66
#define d_sharp 311.13
#define e 329.63
#define f 349.23
#define f_sharp 369.99
#define g 392.00
#define g_sharp 415.30
#define a 440.00
#define a_sharp 466.16
#define b 493.88
#define C 523.25
#define C_SHARP 554.37
#define D 587.33
#define D_SHARP 622.25
#define E 659.25
#define F 698.46
#define F_SHARP 739.99
#define G 783.99
#define G_SHARP 830.61
#define A 880.00
#define A_SHARP 932.33
#define B 987.77
#define REST 0
float melody[] = {E , D_SHARP, E , D_SHARP, E , b , D , C ,
a , REST , c , e , a , b , REST ,
e , g_sharp, b , C , REST , e ,
E , D_SHARP, E , D_SHARP, E , b , D , C ,
a , REST , c , e , a , b , REST , e , C , b , a };
int beats[] = {200 , 200 , 200 , 200 , 200 , 200 , 200 , 200 ,
400 , 200 , 200 , 200 , 200 , 400 , 200 ,
200 , 200 , 200 , 400 , 200 , 200 ,
200 , 200 , 200 , 200 , 200 , 200 , 200 , 200 ,
400 , 200 , 200 , 200 , 200 , 400 , 200 , 200 , 200 , 200 , 800 };
int melody_size = sizeof(melody) / sizeof(melody[0]);
/* USER CODE END PV */
저는 "엘리제를 위하여" 곡의 일부를 연주하기 위해 melody를 구성하였습니다.
각 음들의 주파수 값들은 변수로 정의되어 있고,
beats는 그 음을 얼마나 유지할 것인지를 담고 있습니다.
- Main
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_ETH_Init();
MX_USART3_UART_Init();
MX_USB_OTG_FS_PCD_Init();
MX_TIM3_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_3);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
for (int i = 0; i < melody_size; i++) {
float frequency = melody[i];
uint16_t value = (uint16_t)((1000000 / frequency) - 1); // ARR 계산
TIM3->ARR = value;
TIM3->CCR3 = value / 2; // 듀티 사이클 50%
HAL_Delay(beats[i]);
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
첫 음의 주파수를 가져와 ARR과 CCR을 계산하고,
부저는 해당 음을 내게 됩니다.
beats에 담긴 길이동안 음이 지속되고,
loop에 의해 노래가 연주됩니다.
3. 실습결과
기계음이라 어색하긴 하지만, 연주가 잘 됨을 확인할 수 있습니다.
'Embedded' 카테고리의 다른 글
| ARM Cortex M4 core - (5) RTC 알람시계 (0) | 2024.09.04 |
|---|---|
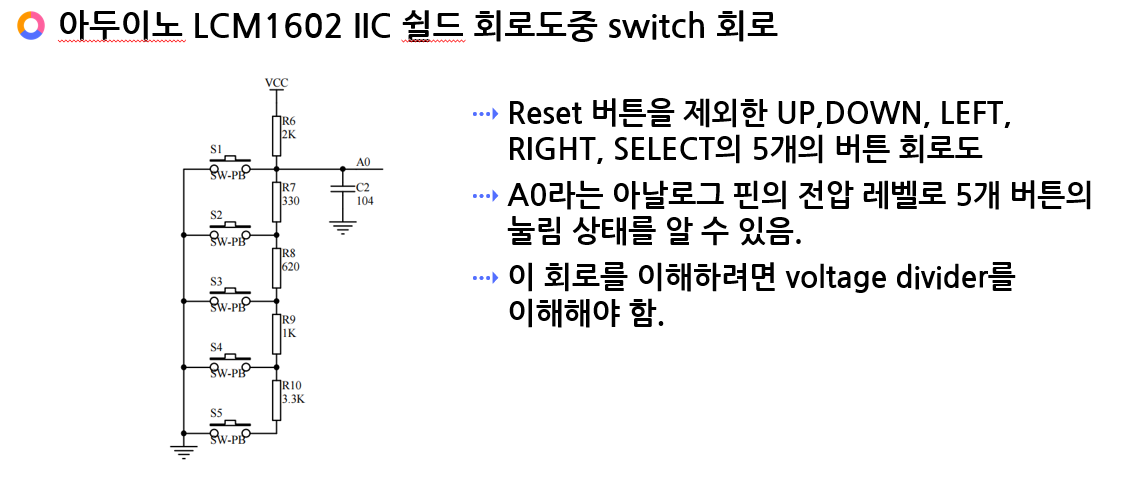
| ARM Cortex M4 core - (4) ADC를 활용한 스위치 Voltage확인 (0) | 2024.09.04 |
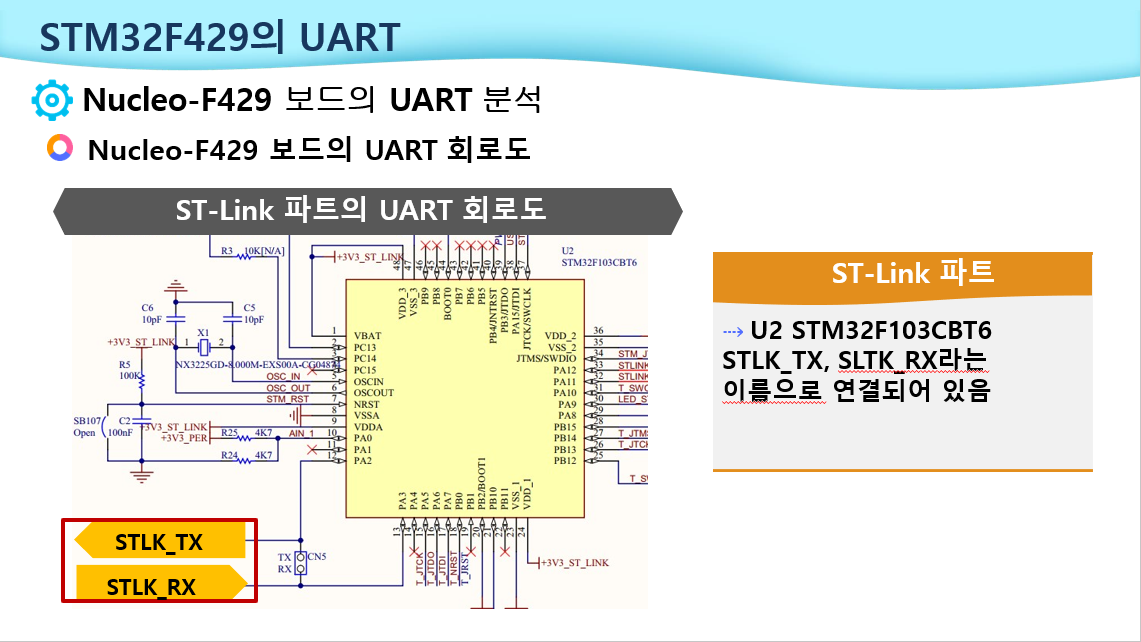
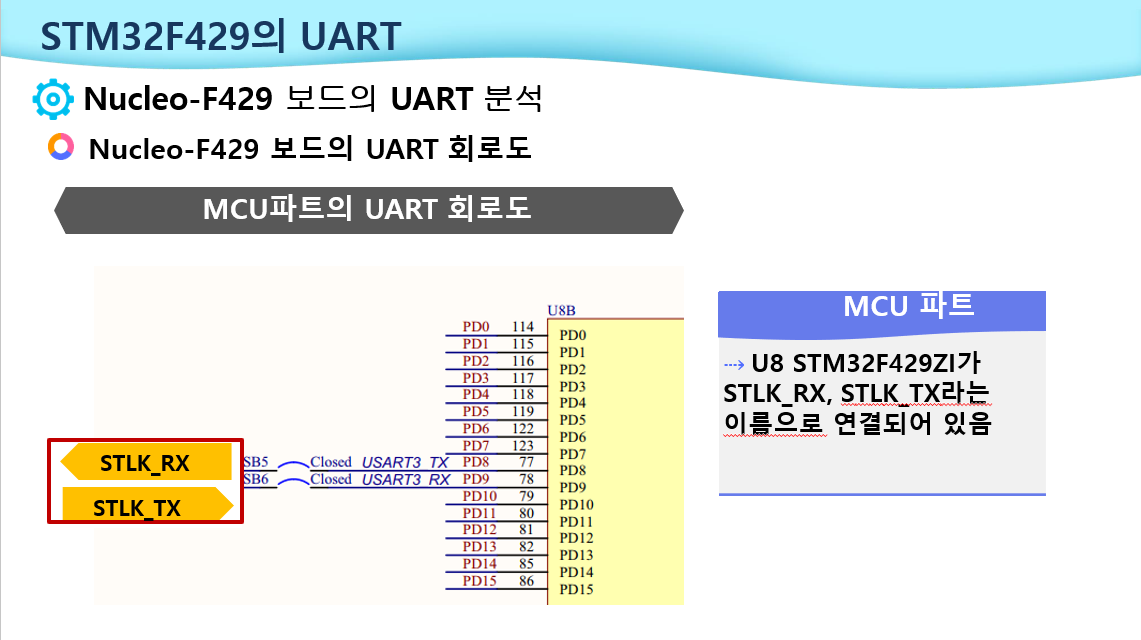
| ARM Cortex M4 core - (3) UART 키보드로 LED제어 (0) | 2024.09.04 |
| ARM Cortex M4 core - (2) EXTI로 FND 제어 (0) | 2024.09.04 |
| ARM Cortex M4 core - (1) GPIO로 LED 동작 (0) | 2024.09.04 |