진행년월: 24.08
- 이전 글
(1) 2차원 Filter : https://chonh0531.tistory.com/20
Filter - (2) FPGA에서 CNN구현
진행년월: 24.08 목차1. 배경2. 과제 정의 및 개요3. 소스코드4. 시뮬레이션 결과 1. 배경CNN 모델 중 가장 기본적인 Lenet-5 모델을 구현해보려고 합니다.메모리 등을 고려해야 하기 때문에,성능 자
chonh0531.tistory.com
목차
1. 배경
2. 과제 정의 및 개요
3. 소스코드
4. 시뮬레이션 결과
1. 배경
CNN 모델 중 가장 기본적인 Lenet-5 모델을 구현해보려고 합니다.
메모리 등을 고려해야 하기 때문에,
성능 자체를 끌어올리기보다는 구현 자체에 초점을 맞춥니다.
2. 과제 정의 및 개요

구현할 모델은 위와 같습니다.
1. CNN Python코드 작성
2. Verilog 구현용 C코드 작성
3. Verilog 코드 구현
4. 이미지 예측 정확도 평가
3. 소스코드
- Python CNN
import tensorflow as tf
from tensorflow.keras import layers, models
import numpy as np
import struct
# **1. LeNet-5 모델 정의**
def build_lenet5():
model = models.Sequential([
layers.Conv2D(6, (5, 5), activation='relu', input_shape=(28, 28, 1)),
layers.AveragePooling2D((2, 2)),
layers.Conv2D(16, (5, 5), activation='relu'),
layers.AveragePooling2D((2, 2)),
layers.Flatten(),
layers.Dense(120, activation='relu'),
layers.Dense(84, activation='relu'),
layers.Dense(10, activation='softmax')
])
return model
# **2. 데이터셋 로드 및 전처리**
def load_data():
(x_train, y_train), (x_test, y_test) = tf.keras.datasets.mnist.load_data()
x_train = x_train / 255.0 # Normalize to [0, 1]
x_test = x_test / 255.0
x_train = np.expand_dims(x_train, axis=-1) # Add channel dimension
x_test = np.expand_dims(x_test, axis=-1)
return (x_train, y_train), (x_test, y_test)
# **3. 양자화 함수: 32비트를 8/11비트로 변환**
def quantize(value, bits=8, frac_bits=4):
scale = 2 ** frac_bits
quantized = np.round(value * scale)
quantized = np.clip(quantized, -(2 ** (bits - 1)), 2 ** (bits - 1) - 1)
return quantized.astype(np.int16)
# **4. 학습과 가중치 저장**
def train_and_save_weights(model, x_train, y_train, x_test, y_test, quant_bits=8, frac_bits=4):
model.compile(optimizer='adam',
loss='sparse_categorical_crossentropy',
metrics=['accuracy'])
model.fit(x_train, y_train, epochs=5, validation_data=(x_test, y_test))
test_loss, test_acc = model.evaluate(x_test, y_test)
print(f"Test Accuracy (Python): {test_acc:.4f}")
# Save weights for FPGA implementation
for layer in model.layers:
if isinstance(layer, (layers.Conv2D, layers.Dense)):
layer_weights, layer_biases = layer.get_weights()
# 양자화된 가중치 저장
quantized_weights = quantize(layer_weights, quant_bits, frac_bits)
quantized_biases = quantize(layer_biases, quant_bits, frac_bits)
# 파일 저장
np.savetxt(f"{layer.name}_weights.txt", quantized_weights.flatten(), fmt='%d')
np.savetxt(f"{layer.name}_biases.txt", quantized_biases, fmt='%d')
print(f"Weights and biases for layer '{layer.name}' saved.")
print("All layer weights and biases saved.")
return test_acc
# **5. 테스트 데이터 저장 (Verilog 테스트벤치용)**
def save_test_data(x_test, y_test):
(x_test, y_test) = (x_test[:1000], y_test[:1000]) # 제한된 샘플 수로 간단히 처리
x_test_flat = x_test.reshape(x_test.shape[0], -1) # Flatten 28x28 images to 784
# Save test data
np.savetxt('test_images.txt', x_test_flat, fmt='%d') # Save as integer values (0-255)
np.savetxt('test_labels.txt', y_test, fmt='%d') # Save labels
print("Test images and labels saved.")
# **Main Script**
if __name__ == "__main__":
# Load data
(x_train, y_train), (x_test, y_test) = load_data()
# Build model
model = build_lenet5()
# Train model and save weights
python_accuracy = train_and_save_weights(model, x_train, y_train, x_test, y_test)
# Save test data
save_test_data(x_test, y_test)
python으로 모델을 구성한 뒤, 학습을 진행합니다.
테스트 데이터는 MNIST 데이터를 사용하였습니다.
학습된 모델의 Weight와 Bias를 Vivado에서 Block 메모리 초기화 파일로 사용하기 위해
COE 파일로 저장합니다.
- Verilog CNN 이전 Convolution test
module cnn (
input clk,
input reset,
input [7:0] t_rdata,
output reg [9:0] t_addr,
output reg [11:0] output_address, // Output memory address
output reg signed [10:0] output_data, // Output write data
output reg output_write_enable // Output write enable
);
// RAM Signals
reg [9:0] image_address;
reg [7:0] image_write_data;
wire [7:0] image_read_data;
reg image_write_enable;
wire signed [10:0] output_read_data;
// ROM Signals
reg [7:0] weight_address;
wire signed [7:0] weight_read_data;
reg [2:0] bias_address;
wire signed [7:0] bias_read_data;
// Loop Index Registers
reg [4:0] row, next_row, col, next_col;
reg [2:0] filter, next_filter, kernel_row, next_kernel_row, kernel_col, next_kernel_col;
// Additional Registers
reg [9:0] current_image_address, next_image_address;
(* use_dsp = "yes" *) reg signed [18:0] conv_sum, next_conv_sum;
reg [7:0] current_weight_address, next_weight_address;
reg [11:0] current_output_address, next_output_address;
reg signed [10:0] temp_output, next_temp_output;
// State Definitions
localparam s0 = 0, s1 = 1, s2 = 2, s3 = 3, s4 = 4, s5 = 5, s6 = 6;
reg [3:0] state, next_state;
// File Descriptor
integer fd;
// RAM Instantiation
i_ram image_ram (
.clka(clk),
.wea(image_write_enable),
.addra(image_address),
.dina(image_write_data),
.douta(image_read_data)
);
a_ram output_ram (
.clka(clk),
.wea(output_write_enable),
.addra(output_address),
.dina(output_data),
.douta(output_read_data)
);
// ROM Instantiation
w0_rom weight_rom (
.clka(clk),
.addra(weight_address),
.douta(weight_read_data)
);
b0_rom bias_rom (
.clka(clk),
.addra(bias_address),
.douta(bias_read_data)
);
// Finite State Machine (FSM)
always @ (reset, state, t_rdata, image_read_data, output_read_data, weight_read_data, bias_read_data, row, col, filter, kernel_row, kernel_col, current_image_address, conv_sum, current_weight_address, current_output_address, temp_output) begin
// Default memory settings
t_addr = 0;
image_address = 0;
image_write_data = 0;
image_write_enable = 0;
output_address = 0;
output_data = 0;
output_write_enable = 0;
weight_address = 0;
bias_address = 0;
// Default register settings
next_state = state;
next_row = row;
next_col = col;
next_filter = filter;
next_kernel_row = kernel_row;
next_kernel_col = kernel_col;
next_image_address = current_image_address;
next_conv_sum = conv_sum;
next_weight_address = current_weight_address;
next_output_address = current_output_address;
next_temp_output = temp_output;
case (state)
s0: begin
next_state = s1;
next_image_address = 0;
t_addr = 0;
next_row = 0;
next_col = 0;
end
s1: begin
image_write_data = t_rdata;
image_address = current_image_address;
image_write_enable = 1'b1;
next_state = s1;
next_col = col + 1;
if (next_col == 28) begin
next_col = 0;
next_row = row + 1;
if (next_row == 28) begin
next_row = 0;
next_state = s2;
end
end
next_image_address = next_row * 28 + next_col;
t_addr = next_image_address;
end
s2: begin
next_filter = 0;
next_row = 0;
next_col = 0;
next_conv_sum = 0;
next_kernel_row = 0;
next_kernel_col = 0;
image_address = 0;
weight_address = 0;
next_state = s3;
end
s3: begin
next_conv_sum = conv_sum + $signed({1'b0, image_read_data}) * weight_read_data;
next_state = s3;
next_kernel_col = kernel_col + 1;
if (next_kernel_col == 5) begin
next_kernel_col = 0;
next_kernel_row = kernel_row + 1;
if (next_kernel_row == 5) begin
next_kernel_row = 0;
next_state = s4;
bias_address = filter;
end
end
next_image_address = (row + next_kernel_row) * 28 + col + next_kernel_col;
next_weight_address = filter * 25 + next_kernel_row * 5 + next_kernel_col;
image_address = next_image_address;
weight_address = next_weight_address;
end
s4: begin
next_temp_output = conv_sum[18:8];
if (next_temp_output[10] == 1'b1) begin
next_temp_output = next_temp_output + (|conv_sum[7:0]); // Round towards zero (RTZ)
end
next_temp_output = next_temp_output + bias_read_data;
if (next_temp_output[10] == 1'b1) begin
next_temp_output = 0;
end
next_output_address = filter * 576 + row * 24 + col;
output_address = next_output_address;
output_data = next_temp_output;
output_write_enable = 1'b1;
next_state = s3;
next_col = col + 1;
if (next_col == 24) begin
next_col = 0;
next_row = row + 1;
if (next_row == 24) begin
next_row = 0;
next_filter = filter + 1;
if (next_filter == 6) begin
next_filter = 0;
next_state = s5;
end
end
end
next_conv_sum = 0;
next_image_address = next_row * 28 + next_col;
next_weight_address = next_filter * 25;
image_address = next_image_address;
weight_address = next_weight_address;
end
s5: begin
next_state = s5;
end
default: begin
next_state = s0;
end
endcase
if (reset == 1) begin
next_state = s0;
next_row = 0;
next_col = 0;
next_filter = 0;
next_kernel_row = 0;
next_kernel_col = 0;
next_image_address = 0;
next_conv_sum = 0;
next_weight_address = 0;
next_output_address = 0;
next_temp_output = 0;
end
end
// State update on clock edge
always @ (posedge clk) begin
state <= next_state;
row <= next_row;
col <= next_col;
filter <= next_filter;
kernel_row <= next_kernel_row;
kernel_col <= next_kernel_col;
current_image_address <= next_image_address;
conv_sum <= next_conv_sum;
current_weight_address <= next_weight_address;
current_output_address <= next_output_address;
temp_output <= next_temp_output;
end
// Synthesis directives and file writing
// synthesis translate_off
always @ (posedge clk) begin
fd = $fopen("test.txt", "a");
if (state == s4 && output_write_enable == 1'b1) begin
$fwrite(fd, "A[%0d][%0d][%0d] = %0d\n", filter, row, col, output_data);
end
if (reset == 1) begin
fd = $fopen("test.txt", "w");
end
$fclose(fd);
end
// synthesis translate_on
endmodule
module tb;
reg clk;
reg reset;
wire [9:0] t_addr;
wire [7:0] t_rdata;
wire [11:0] output_address;
wire [10:0] output_data;
wire output_write_enable;
//
// ROM instantiation
//
t_rom t_test (
.clka(clk),
.addra(t_addr),
.douta(t_rdata)
);
//
// CNN instantiation
//
cnn uut (
.clk(clk),
.reset(reset),
.t_addr(t_addr),
.t_rdata(t_rdata),
.output_address(output_address),
.output_data(output_data),
.output_write_enable(output_write_enable)
);
// 100 MHz clock
initial begin
clk = 0;
forever #5 clk = ~clk;
end
// reset
initial begin
reset = 0;
#100 reset = 1;
#100 reset = 0;
end
endmodule
Verilog로 구현하기 전에 가장 중요한 Convolution 층을 먼저 구현하여 테스트 하였습니다.
- Verilog CNN
module lenet5_fpga (
input clk,
input reset,
input [7:0] input_data, // 8-bit quantized input pixel data
output reg [3:0] output_class, // Predicted class (0-9)
output reg done // Processing done signal
);
// Parameters
parameter IMG_SIZE = 28;
parameter NUM_CLASSES = 10;
// State Machine States
localparam IDLE = 0, LOAD_IMAGE = 1,
CONV1 = 2, POOL1 = 3,
CONV2 = 4, POOL2 = 5,
FLATTEN = 6, FC1 = 7, FC2 = 8, FC3 = 9, DONE = 10;
reg [3:0] state;
// Layer Buffers
reg [7:0] image [0:IMG_SIZE-1][0:IMG_SIZE-1]; // 8-bit Image Data
reg signed [10:0] conv1_out [0:23][0:23][0:5]; // 11-bit Conv1 output
reg signed [10:0] pool1_out [0:11][0:11][0:5]; // 11-bit Pool1 output
reg signed [10:0] conv2_out [0:7][0:7][0:15]; // 11-bit Conv2 output
reg signed [10:0] pool2_out [0:3][0:3][0:15]; // 11-bit Pool2 output
reg signed [10:0] fc1_out [0:119]; // FC1 output
reg signed [10:0] fc2_out [0:83]; // FC2 output
reg signed [10:0] fc3_out [0:NUM_CLASSES-1]; // FC3 output
// Flatten Buffer
reg signed [10:0] pool2_flat [0:399]; // Flattened Pool2 Output
// Temporary Registers
reg signed [18:0] conv_sum; // For convolution accumulation
reg signed [18:0] fc_sum; // For FC accumulation
reg signed [10:0] max_val;
reg [3:0] max_index;
integer i, j, k, kr, kc, c, row, col;
// Block Memory Generators for weights and biases
wire [7:0] conv1_weight_data;
wire [7:0] conv2_weight_data;
wire [7:0] fc1_weight_data;
wire [7:0] fc2_weight_data;
wire [7:0] fc3_weight_data;
wire [7:0] bias_data;
reg [15:0] conv1_weight_addr;
reg [15:0] conv2_weight_addr;
reg [15:0] fc1_weight_addr;
reg [15:0] fc2_weight_addr;
reg [15:0] fc3_weight_addr;
reg [15:0] bias_addr;
// Instantiate Block RAMs for weights and biases
blk_mem_gen_conv1_weights conv1_weights_bram (
.clka(clk),
.wea(1'b0),
.addra(conv1_weight_addr),
.dina(8'b0),
.douta(conv1_weight_data)
);
blk_mem_gen_conv2_weights conv2_weights_bram (
.clka(clk),
.wea(1'b0),
.addra(conv2_weight_addr),
.dina(8'b0),
.douta(conv2_weight_data)
);
blk_mem_gen_fc1_weights fc1_weights_bram (
.clka(clk),
.wea(1'b0),
.addra(fc1_weight_addr),
.dina(8'b0),
.douta(fc1_weight_data)
);
blk_mem_gen_fc2_weights fc2_weights_bram (
.clka(clk),
.wea(1'b0),
.addra(fc2_weight_addr),
.dina(8'b0),
.douta(fc2_weight_data)
);
blk_mem_gen_fc3_weights fc3_weights_bram (
.clka(clk),
.wea(1'b0),
.addra(fc3_weight_addr),
.dina(8'b0),
.douta(fc3_weight_data)
);
blk_mem_gen_bias bias_bram (
.clka(clk),
.wea(1'b0),
.addra(bias_addr),
.dina(8'b0),
.douta(bias_data)
);
// FSM Logic
always @(posedge clk or posedge reset) begin
if (reset) begin
state <= IDLE;
done <= 0;
end else begin
case (state)
IDLE: begin
done <= 0;
state <= LOAD_IMAGE;
end
LOAD_IMAGE: begin
row = 0;
col = 0;
// Sequentially load the image into the buffer
if (row < IMG_SIZE) begin
image[row][col] <= input_data;
col = col + 1;
if (col == IMG_SIZE) begin
col = 0;
row = row + 1;
end
end
// Move to the next state after loading the image
if (row == IMG_SIZE && col == 0) begin
state <= CONV1;
end
end
CONV1: begin
// Convolution Layer 1
for (i = 0; i < 24; i = i + 1) begin
for (j = 0; j < 24; j = j + 1) begin
for (k = 0; k < 6; k = k + 1) begin
conv1_weight_addr = k * 25; // Example address calculation
conv_sum = 0;
for (kr = 0; kr < 5; kr = kr + 1) begin
for (kc = 0; kc < 5; kc = kc + 1) begin
conv_sum = conv_sum +
image[i+kr][j+kc] * conv1_weight_data;
end
end
conv1_out[i][j][k] <= (conv_sum + bias_data) >>> 8;
end
end
end
state <= POOL1;
end
POOL1: begin
for (i = 0; i < 12; i = i + 1) begin
for (j = 0; j < 12; j = j + 1) begin
for (k = 0; k < 6; k = k + 1) begin
pool1_out[i][j][k] <=
(conv1_out[2*i][2*j][k] + conv1_out[2*i+1][2*j][k] +
conv1_out[2*i][2*j+1][k] + conv1_out[2*i+1][2*j+1][k]) >> 2;
end
end
end
state <= CONV2;
end
CONV2: begin
for (i = 0; i < 8; i = i + 1) begin
for (j = 0; j < 8; j = j + 1) begin
for (k = 0; k < 16; k = k + 1) begin
conv_sum = 0;
for (c = 0; c < 6; c = c + 1) begin
for (kr = 0; kr < 5; kr = kr + 1) begin
for (kc = 0; kc < 5; kc = kc + 1) begin
conv_sum = conv_sum +
(pool1_out[i+kr][j+kc][c] * conv2_weight_data);
end
end
end
conv2_out[i][j][k] <= (conv_sum + bias_data) >>> 8;
end
end
end
state <= POOL2;
end
POOL2: begin
for (i = 0; i < 4; i = i + 1) begin
for (j = 0; j < 4; j = j + 1) begin
for (k = 0; k < 16; k = k + 1) begin
pool2_out[i][j][k] <=
(conv2_out[2*i][2*j][k] + conv2_out[2*i+1][2*j][k] +
conv2_out[2*i][2*j+1][k] + conv2_out[2*i+1][2*j+1][k]) >> 2;
end
end
end
state <= FLATTEN;
end
FLATTEN: begin
for (i = 0; i < 400; i = i + 1) begin
pool2_flat[i] <= pool2_out[i/100][(i%100)/25][i%25];
end
state <= FC1;
end
FC1: begin
for (i = 0; i < 120; i = i + 1) begin
fc_sum = 0;
for (j = 0; j < 400; j = j + 1) begin
fc1_weight_addr = i * 400 + j;
fc_sum = fc_sum + pool2_flat[j] * fc1_weight_data;
end
fc1_out[i] <= (fc_sum + bias_data) >>> 8;
end
state <= FC2;
end
FC2: begin
for (i = 0; i < 84; i = i + 1) begin
fc_sum = 0;
for (j = 0; j < 120; j = j + 1) begin
fc2_weight_addr = i * 120 + j;
fc_sum = fc_sum + fc1_out[j] * fc2_weight_data;
end
fc2_out[i] <= (fc_sum + bias_data) >>> 8;
end
state <= FC3;
end
FC3: begin
max_val = -32768;
for (i = 0; i < NUM_CLASSES; i = i + 1) begin
fc_sum = 0;
for (j = 0; j < 84; j = j + 1) begin
fc3_weight_addr = i * 84 + j;
fc_sum = fc_sum + fc2_out[j] * fc3_weight_data;
end
fc3_out[i] <= (fc_sum + bias_data) >>> 8;
if (fc3_out[i] > max_val) begin
max_val = fc3_out[i];
max_index = i;
end
end
output_class <= max_index;
state <= DONE;
end
DONE: begin
done <= 1;
end
endcase
end
end
endmodule
이제 모든 층을 구현하여 코드를 구성합니다.
장비의 Memory가 충분치 않아 성능의 타협을 보고
32비트 floating point를 8비트 fixed point로 구현하였습니다.
- Verilog CNN Testbench
`timescale 1ns / 1ps
module tb_lenet5_fpga;
// Signals
reg clk;
reg reset;
reg [7:0] input_data;
wire [3:0] output_class;
wire done;
// Parameters
parameter CLK_PERIOD = 10; // Clock period
parameter NUM_IMAGES = 1000; // Number of images to process
parameter IMG_SIZE = 28; // Image size (28x28)
// File I/O
integer input_file, output_file;
integer i, j, k;
reg [7:0] image_buffer [0:IMG_SIZE*IMG_SIZE-1]; // Buffer to hold one image
// Instantiate DUT (Device Under Test)
lenet5_fpga dut (
.clk(clk),
.reset(reset),
.input_data(input_data),
.output_class(output_class),
.done(done)
);
// Clock generation
always #(CLK_PERIOD / 2) clk = ~clk;
// Testbench Logic
initial begin
// Initialize
clk = 0;
reset = 1;
input_data = 0;
// Open input image file
input_file = $fopen("test_image.txt", "r");
if (input_file == 0) begin
$display("Error: Input image file not found!");
$finish;
end
// Open output file
output_file = $fopen("verilog_predietions.txt", "w");
if (output_file == 0) begin
$display("Error: Could not open output file!");
$finish;
end
// Deassert reset after a few cycles
#20 reset = 0;
// Process NUM_IMAGES images
for (k = 0; k < NUM_IMAGES; k = k + 1) begin
$display("Processing image %d/%d...", k + 1, NUM_IMAGES);
// Load one image into the buffer
for (i = 0; i < IMG_SIZE * IMG_SIZE; i = i + 1) begin
if (!$feof(input_file)) begin
$fscanf(input_file, "%d ", image_buffer[i]);
end else begin
$display("Error: Unexpected end of input file!");
$finish;
end
end
// Feed image buffer to DUT
for (i = 0; i < IMG_SIZE; i = i + 1) begin
for (j = 0; j < IMG_SIZE; j = j + 1) begin
input_data = image_buffer[i * IMG_SIZE + j];
#CLK_PERIOD;
end
end
// Wait for done signal
wait (done);
// Write output class to file
$fwrite(output_file, "%d\n", output_class);
end
$display("All images processed. Results saved to verilog_predictions.txt.");
// Close files and finish simulation
$fclose(input_file);
$fclose(output_file);
$finish;
end
endmodule
이제 미리 준비한 test 데이터를 input으로 해서,
모델로 예측한 결과값들을 txt 파일로 저장합니다.
4. 시뮬레이션 결과
- Python 정확도
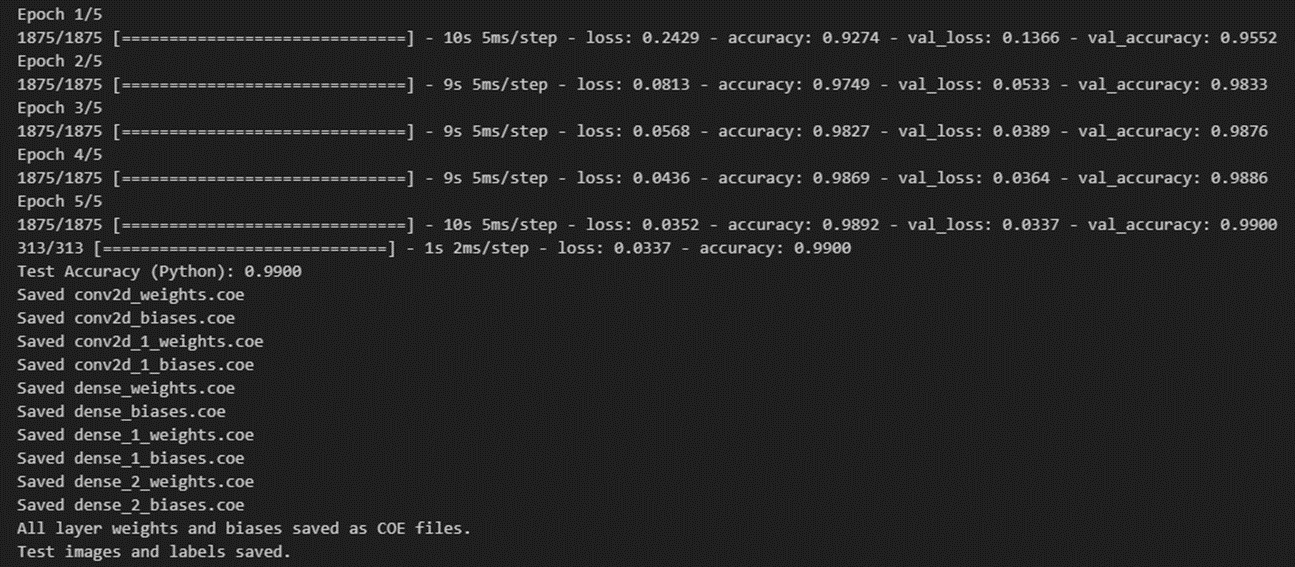
Python에서 확인한 정확도는 99%로,
실제 다른 경우에서는 이정도 정확도를 가지기 어렵지만
학습용 데이터를 사용하였기 때문에 가능합니다.
- FPGA 정확도
FPGA에서 나온 예측값들의 정확도는 96%로,
앞서 8bit fixed point로 구현하면서 타협봤었죠.
모델의 성능 차이는 3% 내외로 준수한 성능을 보입니다.
다른 경우에서는 Domain에 따라 어느 정도까지 타협을 볼지 정해야겠지만,
장비의 memory를 생각하며 먼저 python으로 성능을 테스트 한 뒤에
FPGA에 그 모델을 구현해서 칩에 AI를 구성할 수 있습니다.
'RTL, Synthesis, P&R' 카테고리의 다른 글
| Filter - (1) 2차원 Filter (0) | 2024.09.09 |
|---|---|
| Cortex-M0 SOC 활용 - (3) Snake game with API (0) | 2024.09.09 |
| Cortex-M0 SOC 활용 - (2) Peripheral with C,CMCIS (0) | 2024.09.09 |
| Cortex-M0 SOC 활용 - (1) AMBA3 AHB-Lite와 Pheripheral (0) | 2024.09.09 |
| 16KB Cache Memory Controller - (1) RTL 및 Coverage (0) | 2024.09.07 |